
Page 7 - Demo
P. 7
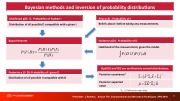
Bayesian methods and inversion of probability distribu@ons
Prior p (I) : Probability of I
Beliefs about I before taking any measurements.
Likelihood p(D| I): Probability of D given I
Distribu@on of all possible D compa@ble with a given I.
Bayes theorem
P(I|D)= P(D|I)P(I) P(D)
Evidence p(D): Probability of D
Likelihood of the measurement, given the model.
∫P(D | I)P(I)dI
If p(D|I) and P(I) are mul2variate normal distribu2ons:
Posterior covariance1
Σ=(KTΣ K+Σ )−1 DI
Posterior expected value
μ = ΣKT Σ−1D D
Posterior p (I| D): Probability of I given D
Distribu@on of all possible I compa@ble with D
1 ΣD ΣI Defined in next slide
Presenter : J.Romero. Sesion T07. Computational and theoretical Techniques. APS 2016.
7
